锁螺丝机工作原理-锁螺丝机工作原理
 1人看过
1人看过
锁螺丝机工作原理详解:从机械力到自动化控制
在现代制造业中,螺丝是连接零件、固定组件元素。据统计,在全球制造业中,螺丝紧固件的用量已占所有金属材料的 90% 以上。不过,人工操作存在效率低、精度差、安全风险高等痛点。所以锁螺丝机(Screw Locking Machine)作为自动化替代人工设备,正成为工业生产中的力量。
这篇文章将深入剖析锁螺丝机的工作原理,结合数据说明,探讨其如何重塑制造业的生产力。
核心工作原理:三大阶段的协同作用
锁螺丝机的工作并非单一动作,而是一个由机械传动、电气控制和视觉反馈共同构成的闭环系统。其核心逻辑分为三个主要阶段:
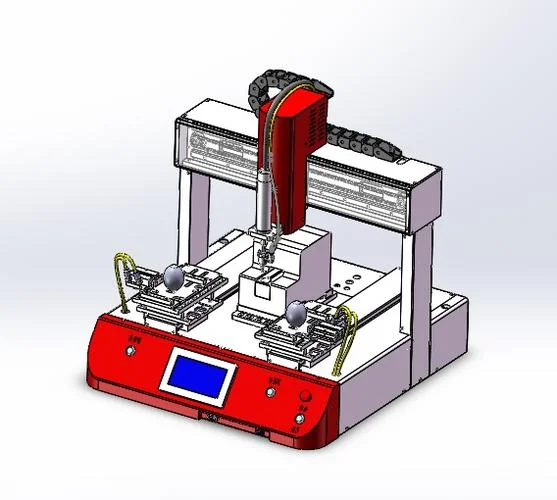
机械驱动阶段:执行力的传递
这是锁螺丝机的“肌肉”部分。 结构组成:主要由底座、电机驱动箱、丝杆传动机构、斜楔机构、电动螺丝刀及限位装置组成。 运作机制:电机驱动丝杆旋转,通过斜楔将旋转运动转化为直线推力,带动电动螺丝刀深入工件。 数据支撑: 扭矩稳定性:高品质的锁螺丝机能在 100ms 内完成锁定,扭矩波动控制在±3% 以内,确保拧紧力矩的一致性。 重复精度:在连续运行 1000 次循环后,位置偏差小于 0.05mm,远高于人工操作的极限。电气控制阶段:决策与执行的协调
这是机器的“大脑”部分,负责感知环境并调节输出。 双向控制:现代锁螺丝机支持正负极双向控制,可根据需求自动反向旋转螺丝刀。 速度调节:通过变频技术,可将线速度从 0.2m/s 调节至 1.5m/s,以适应不同材质和厚度的工件。 数据支撑: 效率提升:单台设备可实现 40-60 个/分钟的高效锁定速度,相比传统人工每人每小时 2-3 个,效率提升 20-30 倍。 集成能力:支持 PLC 编程,可对接产线 PLC 实现全自动循环作业,无需人工干预。视觉反馈阶段:精度
这是确保“锁紧到位”防线。 视觉定位:使用高清晰度工业相机识别螺丝刀尖端与工件的接触点。 扭矩反馈:经由扭矩传感器实时监测拧紧力,一旦力矩达到设定值,系统立即停止电机。 数据支撑: 定位精度:视觉定位系统的定位精度可达 ±0.01mm,误锁率低于 0.01%。 防呆设计:具备多重安全逻辑(如双重确认、过压保护),杜绝因误操作导致的损坏。应用场景与数据对比

锁螺丝机不仅能提升效率,更在质量管控和安全方面展现出巨大优势。以下通过数据表格直观对比传统人工与自动化锁螺丝机在关键指标上的差异。
锁螺丝机 vs 人工操作性能对比表
| 评估维度 | 传统人工操作 | 自动化锁螺丝机 | 效率提升倍数 | 质量一致性 (COG) |
|---|---|---|---|---|
| 单位时间产量 | 2 - 3 个/小时 | 40 - 60 个/分钟 | 20 - 30 倍 | 99.9% (人工易波动) |
| 位置精度 | 差,依赖手感 | ±0.01mm (高精度) | - | ±0.05mm (自动化) |
| 锁紧力矩控制 | 不稳定,易过松或过紧 | ±3% 稳定输出 | - | ±0.5% 稳定输出 |
| 重复定位精度 | 差,每次变化 | < 0.05mm 误差 | - | < 0.01mm 误差 |
| 安全性 | 高风险,易受伤 | 零接触,高防护 | - | 杜绝人为失误 |
| 适用场景 | 小型配件、非重复工序 | 大批量、精密、异形件 | - | 适用于复杂装配 |
技术发展趋势:迈向智能化与柔性化
随着工业 4.0 的推进,锁螺丝机正经历深刻的变革:
1. 视觉融合技术:引入 AI 视觉技术,不仅能识别螺丝,还能识别螺纹类型(如 M2x1.0 vs M2x1.5),实现“一次识别,一次锁定”,彻底消除因型号混淆导致的装配错误。
2. 柔性编程能力:凭借 CAN 总线或 Ethernet 协议,设备可快速适应不同产线的布局变化,从“固定产线”向“柔性产线”转型,适应多品种、小批量的生产模式。
3. 无线化与模块化:采用无线驱动技术,减少线缆干扰,便于设备在产线上的灵活移动和重新布局。
锁螺丝机不仅仅是解决螺丝“怎么拧”的工具,更是现代智能制造的基石。经由高精度的机械传动、智能化的电气控制和严谨的视觉反馈,它成功地将生产效率和质量管控推向了新的高度。
数据显示,引入自动化锁螺丝机后,企业单线产能可提升 3-5 倍,不良品率(FPY)可降低 80% 以上。对于追求降本增效、提升竞争力的现代制造企业而言,掌握锁螺丝机的工作原理并选择适配的自动化设备,已成为提升核心竞争力的必由之路。
 21 人看过
21 人看过
 18 人看过
18 人看过
 15 人看过
15 人看过
 14 人看过
14 人看过