四足机器人工作原理-四足机器人工作原理
 3人看过
3人看过
四足机器人工作原理:从机械结构到智能控制的深度解析
随着机器人技术的飞速发展,四足机器人(Quadruped Robots)正逐渐从科幻概念走向现实应用。它们不仅拥有人类的直立姿态,更具备行走、攀爬、跳跃等复杂运动能力。四足机器人在于其独特的多足动力学系统与实时感知决策机制。机械结构、能量供给、运动控制及智能算法四个维度,深入剖析其工作原理。
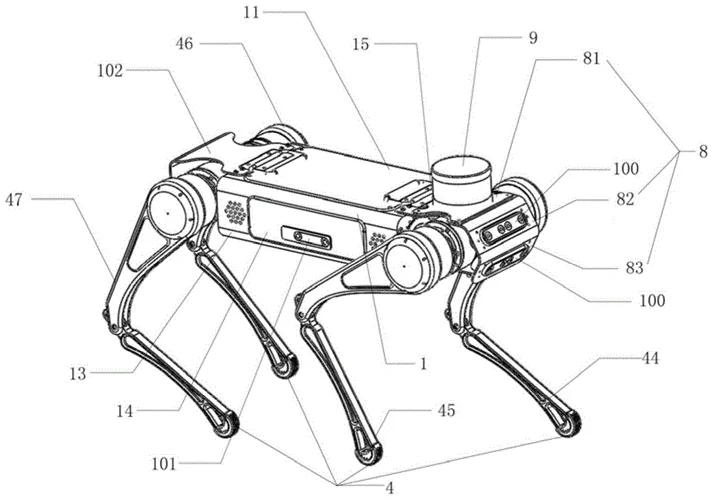
核心机械结构:稳定性与平衡的基石
四足机器人的设计首要目标是实现高效、稳定的运动,而非仅仅模仿人类的步态。其身体结构由下肢、躯干和四肢组成,其中下肢的分布直接决定了机器人的重心稳定性。
下肢系统
为了适应不同地形,四足机器人的腿部结构呈现多样化设计: 膝关节与踝关节:大多数四足机器人采用双膝关节或单膝关节加双踝关节的设计,以增强关节的灵活性与承重能力。 承重腿与摆动腿:在运动过程中,机器人需要交替使用承重腿(支撑身体重量)和摆动腿(产生推进力)。通过精确控制关节角度,机器人能在单足支撑时开展跳跃(如哈曼四足机器人),或在双足支撑时进行行走。平衡与稳定性控制
四足机器人最怕的是“倾倒”。其平衡系统包含以下关键组件: 力矩传感器:安装在关节处,实时监测关节处的扭矩,为控制器提供反馈数据。 视觉伺服系统:利用双目视觉或单目视觉,实时识别地面纹理和障碍物,预测下一步的运动轨迹。 尾椎杆(Tail):部分设计在背部设有尾椎杆,通过改变重心或作为平衡支点,显著提升机器人的抗倾倒能力。数据说明:重心位置对稳定性影响
研究表明,四足机器人的重心位置对其稳定性影响显著。
> | 参数 | 数值 | 说明 |
| :--- | :--- | :--- |
| 机器人总重量 | 180 kg | 20 英寸哈曼四足机器人 |
| 单足支撑重量 | 90 kg | 运动时的单腿承重能力 |
| 重心高度 | 60 cm | 位于躯干中部,有利于腿部摆动时的恢复 |
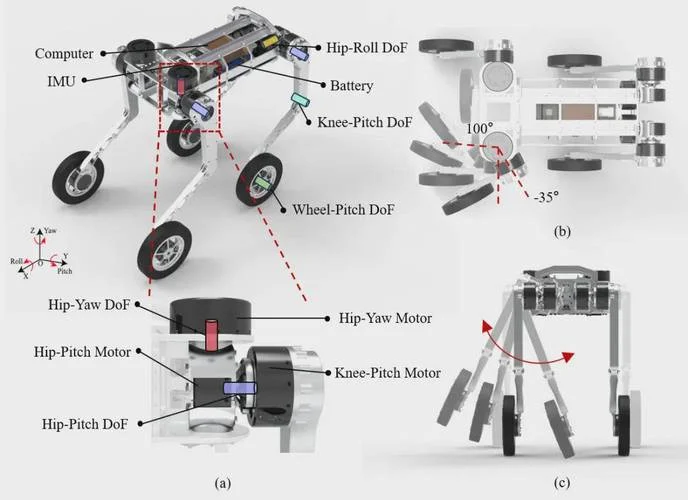
| 最小单足支撑角度 | 115° | 超过此角度才具备跳跃能力 |
能量供给系统:高效与可持续
四足机器人的动力来源决定了其续航能力和作业效率。目前主流的驱动方式包括液压、气动、电机和电池供电。
动力源分类
液压驱动:适用于重载或需要强劲爆发力的场景(如搜救机器人),但体积大、维护复杂。 气动驱动:响应速度快、成本低,常用于轻型装备,但受气压系统限制。 电机驱动:目前最主流的选择,兼具高效、静音和模块化长处。通过齿轮箱减速,将电机的高速旋转转化为关节的平稳运动。 电推进(电动推进器):适用于无轮或高机动性场景,直接由电池供电,响应极快。能量管理策略
为了延长续航,现代四足机器人采用了先进的能量管理策略: 能量收集:利用太阳能、风能、动能回收(如着陆冲击吸收)等方式补充电量。 智能休眠:在非活跃状态下,机器人可进入低功耗休眠模式,大幅降低能耗。数据说明:能耗与效率对比
根据某制造商发布的测试报告,四足机器人的能耗特性如下:
> | 驱动类型 | 单次行走能耗 (Wh) | 能量密度 | 适用场景 |
| :--- | :--- | :--- | :--- |
| 电推进 | 2.5 Wh/kg | 高,响应快 | 室内探索、医疗巡检 |
| 液压驱动 | 8.0 Wh/kg | 中,爆发力强 | 野外救援、重载搬运 |
| 电池供电 | 4.0 Wh/kg | 高 | 通用型探索任务 |
运动控制:从物理模型到智能决策
四足机器人的运动控制是一个复杂的非线性反馈过程,关键包含运动规划与控制、平衡控制、位姿控制和路径规划四个子任务。
运动控制与平衡
这是四足机器人最核心。传统方法多采用马尔可夫密度函数(MDF),利用统计模型预测未来几步的运动状态。 前馈控制:根据预设的步态序列(如单足支撑 - 双足支撑 - 跳跃),提前调整关节角度。 反馈控制:凭借力矩传感器实时监测关节力矩,当检测到失衡趋势时,立即反向修正关节角度,防止摔倒。位姿控制与路径规划
位姿控制:确保机器人关节处于正确的角度和时序,以保证行走姿态的平滑性,避免抖动。 路径规划:将复杂的三维环境分解为一系列二维平面路径,机器人经由判断相邻路径的相似性来决定下一步的动作。数据说明:步态效率与能耗
不同步态的效率差异巨大。研究表明,单足支撑(Single Foot Support) 是四足机器人行走,其步态效率(Step Efficiency)在 2.0-3.0 之间。而在跳跃动作中,虽然步态效率较低(约 1.5),但跳跃距离和高度可达行走的数倍,从而抵消了低效率的损失。
智能算法:赋予机器人“大脑”
四足机器人之所以能适应复杂环境,离不开先进的智能算法支持。这些算法使机器人在面对未知障碍、动态环境时具备极强的适应能力。
感知与决策
多模态感知:结合视觉、深度相机、激光雷达和超声波传感器,构建高精度的 3D 环境模型。 SLAM(即时定位与地图构建):在移动过程中实时建图并定位,确保在未知环境中导航准确。自适应学习
强化学习(Reinforcement Learning):机器人经过试错与奖励机制,自动学习最优的动作策略。,在面对未知地形时,AI 可自主调整步幅和节奏以寻找最佳路径。 模糊逻辑控制:用于处理非线性、不确定的物理现象,弥补传统控制算法的局限。人机交互
语音与手势识别:部分高端四足机器人支持语音指令和手势控制,能够与人类实施自然的交互,实现远程操控或辅助作业。四足机器人不仅仅是机械结构的堆砌,更是机械工程、材料科学、电子工程和人工智能深度融合的产物。从膝关节的精密咬合到 AI 大脑的实时决策,每一处细节都体现了人类对复杂系统的探索精神。随着传感器技术和算法模型,四足机器人将在医疗救援、农业勘探、物流配送乃至家庭陪伴等领域发挥出大的价值,真正走进我们的日常生活。
未来,四足机器人有望从“机器”进化为具备真正“生命特征”的智能体,展现出更加灵活、自主和富有同情心的表现。
 23 人看过
23 人看过
 19 人看过
19 人看过
 16 人看过
16 人看过
 14 人看过
14 人看过