机械手臂的原理-机械手臂工作原理
 2人看过
2人看过
机械手臂的原理:从基础结构到智能化应用
在工业自动化、人工智能以及现代制造业的快速推进中,机械手臂(Robotic Arm)无疑是核心装备。它不仅是人类智慧的延伸,更是连接物理世界与数字世界的桥梁。这篇文章将深入解析机械手臂的工作原理,剖析其核心结构,并结合行业数据探讨其在未来趋势。
核心构成:机械手臂的“骨架”
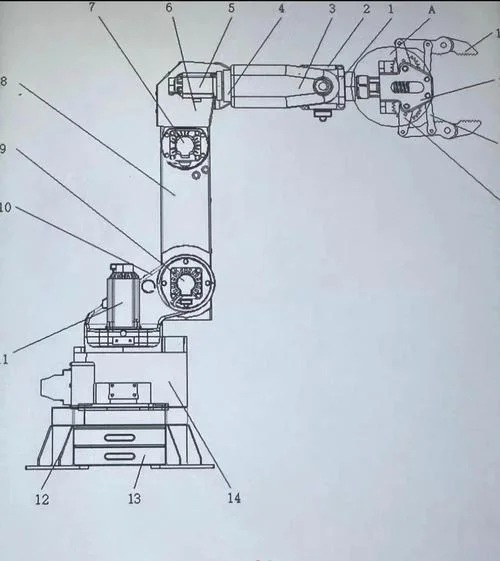
机械手臂并非单一部件,而是一个由多种子系统协同工作的精密机器。其内部结构包含以下几个关键部分:
1. 基座与关节:这是机械手臂的“骨架”,决定了其运动范围和灵活性。常见的关节类型包括旋转关节(用于俯仰)、屈伸关节(用于前伸)和扭转关节(用于旋转)。
2. 动力源:驱动关节运动的能量来源,主要包括液压系统(提供平稳动力)、伺服电机系统(提供高精度控制)和步进电机系统(适用于低成本场景)。
3. 执行器:即“手”,负责抓取、搬运或操作工件。常见的执行器有夹爪(如真空夹爪、气动夹爪)和机械手本身。
4. 感知与控制系统:包含传感器(如编码器、力位传感器)和中央控制器,负责实时监测位置、速度和负载,并发出控制指令。
工作原理:多自由度协同运动
机械手臂的运作基础在于多自由度(Multi-degree of Freedom, DOF)的协同运动。
自由度定义:自由度是指物体在空间中能够独立移动的数目。机械手臂通过多个关节依次连接,形成一系列运动的链式结构。
运动合成:当中央控制器发出指令时,每个关节会以预设的比例和时序开展运动。这种多关节协同效应,使得机械手臂能够模拟人类的“手眼协调”能力,达成复杂的抓取和放置动作。
运动学公式:在工程上,机械臂的运动可经由正运动学(Forward Kinematics)和逆运动学(Inverse Kinematics)来完成。
通过正运动学,已知末端执行器的位置()和朝向,可以计算出各关节的角度和关节的位移量。
凭借逆运动学,已知末端执行器的位置,可以计算出各关节达到该位置所需的姿态和角度。
数据说明:机械臂关节自由度分布
为了更直观地理解不同机械臂的运动能力,下面呢是目前主流机械臂的关节自由度对比表:
| 机械臂类型 | 关节数量 (DOF) | 典型应用 | 优势特点 |
|---|---|---|---|
| 串联型臂 (Scalable) | 6-7 | 物流分拣、流水线 | 结构简单,成本低,易于编程,适合长距离移动 |
| 并联型臂 (Parallel) | 6 | 重型装配、精密加工 | 刚度高,响应快,抗干扰能力强,无需基座 |
| 并联型臂 (6-DOF) | 6 | 柔性装配、人机协作 | 灵活性极高,可完成复杂的多轴动作 |
| 并联型臂 (7-DOF) | 7 | 精密焊接、易碎品处理 | 进一步增加了绕垂直轴的自由度,提升操作灵活性 |
智能化与未来趋势
随着人工智能技术的融入,传统机械臂已演变为具备感知、决策和自主学习能力的智能体。
1. 视觉引导:通过工业相机获取视觉信息,结合深度学习算法,机械臂可在不知晓对象具体形状的情况下实施自动识别和抓取。
2. 自适应控制:利用实时数据反馈,系统能动态调整关节参数,适应不同材质、不同形状工件的抓取需求。
3. 数字孪生:在虚拟环境中对机械臂进行建模和仿真,优化运动轨迹,减少试错成本。
机械手臂不仅是精密机械的集合,更是现代工业智能化的基石。从基础的串联臂到复杂的并联臂,从传统的液压驱动到如今的伺服智能驱动,其技术迭代不断推动着制造业向更高效、更灵活的方向迈进。 6 自由度并联机器人和大规模群体机器人,机械臂将在更多场景中发挥关键作用,重塑我们的生产生活方式。
 21 人看过
21 人看过
 17 人看过
17 人看过
 14 人看过
14 人看过
 14 人看过
14 人看过