五线四相步进电机原理-五线四相步进电机原理
 1人看过
1人看过
五线四相步进电机原理深度解析:从结构到控制
在现代工业自动化、精密电机控制和机器人技术领域,五线四相步进电机是一种应用极其广泛的高频驱动类型。它以其结构紧凑、控制精准、噪音低、运行平稳以及具备双脉冲细分能力而著称,被誉为步进电机家族中的“全能选手”。
这篇文章将深入剖析五线四相步进电机构成、工作原理、控制策略,并结合实际应用场景与数据,为您呈现这一关键驱动技术的全面图景。
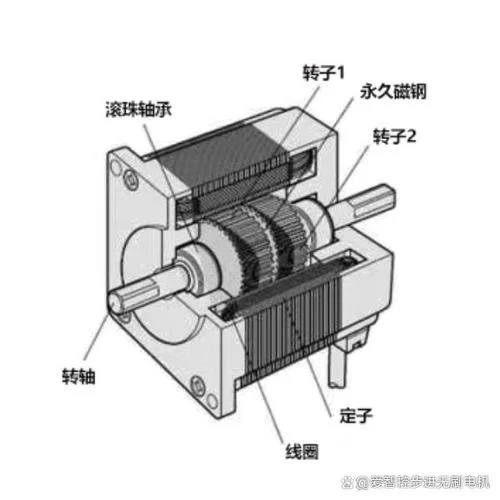
核心结构:五线四相的奥秘
五线四相步进电机之所以被称为“五线”,是因为其定子绕组采用了双线并联的设计;之因此被称为“四相”,是由于其磁极排列采用了四相步进的方式。这种独特的绕组和磁极配置,直接决定了电机的性能特征。
1 定子绕组的双线并联结构
步进电机的定子由若干个电枢极组成。在五线四相设计中,为了增加扭矩并提高齿隙控制能力,相邻的两相绕组并非串联,而是并联连接。 特长分析:双线并联后,电流分配更加均匀,绕组的等效电阻增加,从而降低了启动电流和转速跳变。,它显著增强了电机的齿隙控制能力,使得电机在达到最大齿隙时也能运行,无需像其他类型电机那样依赖机械齿隙即可达到静音状态,非常适合对静音要求很高的场合。2 定子磁极的四相步进排列
电机的定子磁极以 90 度或 45 度的间隔排列,形成四相磁极(如 ABAB 排列)。这种排列方式使得电机在旋转过程中,各磁极依次通过转子,实现了平滑的旋转。工作原理:步进与旋转的转换
步进电机的本质是将数字脉冲信号转换为旋转运动。其工作原理可概括为"通电产生磁场,磁极吸引转子,转子随磁场同步旋转"。
1 旋转逻辑(以四相为例)
假设电机定子磁极按 A、B、C、D 顺序排列,转子为永磁体。当脉冲信号按特定顺序驱动定子绕组时,磁极依次接近转子磁性最强的位置,从而产生扭矩使转子转动。A 相:磁极 A 吸引转子,转子顺时针旋转。
B 相:磁极 B 吸引转子,转子继续顺时针旋转。
C 相:磁极 C 吸引转子,转子继续顺时针旋转。
D 相:磁极 D 吸引转子,转子继续顺时针旋转。
关键点:四相步进电机采用双脉冲控制方法。即每转一圈,需要 4 个脉冲(或 16 个脉冲,取决于细分数),且相位顺序严格遵循 A-B-C-D 循环,严禁出现 A-C-B-D 等反相情况,否则会导致电机转速反转。
控制策略:步进与旋转的转换
为了实现高精度的运动控制,五线四相步进电机结合脉冲编码与细分技术。
1 基本控制模式
基本步(Basic Step):输出 1 个脉冲,电机转动 1 个齿距(对应 0.9°)。 半步(Half Step):输出 2 个脉冲,电机转动 0.45°。 注:全步(Full Step)输出 4 个脉冲,电机转动 0.225°。2 细分控制(Micro-stepping)
这是五线四相电机最核心的优势所在。通过软件指令或硬件驱动芯片配合,将每个脉冲信号进一步细分(如 16 细分、32 细分、64 细分、128 细分)。 原理:将每一个脉冲信号划分为 16 个或更多的小脉冲,使电机转子能够平稳地移动到两个磁极中间位置,而不发生跳动。 效果:细分数越高,电机精度越高,谐波干扰越小,运行越平稳。性能数据对比与选型参考
为了更直观地展示不同细分数对电机性能的影响,以下列出五线四相步进电机在不同细分下的典型数据对比:
| 细分数 (Micro-step) | 最小步距 (Resolution) | 步角精度 (Step Angle) | 最大电流 (Max Current) | 转速稳定性 | 典型应用场景 |
|---|---|---|---|---|---|
| 4 | 10° | 2.25° | 4.0 A | 一般 | 低速重载、常规定位 |
| 8 | 5° | 1.125° | 3.5 A | 良好 | 一般自动化设备 |
| 16 | 2.8125° | 0.56° | 3.0 A | 优秀 | 精密定位、视觉检测 |
| 24 | 1.953° | 0.395° | 2.8 A | 极佳 | 高精度测量、光学对准 |
| 32 | 1.406° | 0.295° | 2.5 A | 卓越 | 高端机器人、高精度 CNC |
| 64 | 0.703° | 0.14° | 2.0 A | 极限 | 激光加工、微位移控制 |
数据说明:最大电流指电机在连续运行时的额定电流,受温度、负载及驱动芯片限制;步角精度指在理想条件下,电机转过的角度偏差。实际应用中,电机精度还受齿隙控制能力、驱动芯片能力及负载惯量影响。
应用前景与总结
五线四相步进电机凭借其高齿隙控制能力、优异的静音性能以及强大的细分自由度,在多个关键领域占据了主导地位:
1. 机器人运动控制:特别是在机械臂关节、人形机器人执行器中,需要实现亚毫米级的定位精度和静音运行,五线四相电机是首选方案。
2. 精密测量设备:如激光干涉仪、光学对准系统,要求很高的重复定位精度和动态响应。
3. 自动化生产线:在包装、计数、分拣等工位,需要快速响应和精确的位置反馈。
4. 航空航天与军工:对振动抑制、噪音控制和运行可靠性有极高要求。
总结:
五线四相步进电机不仅仅是一个简单的旋转装置,它通过双线并联提升电流承载力和齿隙控制,通过四相排列实现平稳旋转,再通过细分技术赋予很高的控制精度。随着驱动芯片技术(如 TMC 系列、爱普生系列等),其智能化、网络化程度正在不断提升,未来将在更多高端制造场景中发挥独特的作用。
对于需要高精度、静音、高稳定性的步进驱动系统而言,深入理解五线四相电机的原理与控制逻辑,是选型与调试的首要任务。
 20 人看过
20 人看过
 14 人看过
12 人看过
14 人看过
12 人看过
 12 人看过
12 人看过