液压机器人的工作原理-液压机器人工作原理
 8人看过
8人看过
液压机器人的工作原理:力量与控制的完美融合
在工业机器人家族中,液压机器人以其强大的负载能力、优秀的刚性和稳定性以及在恶劣环境下的卓越适应性而闻名。与依赖精密电子控制的 6 轴或 7 轴机器人不同,液压机器人经由液压系统达成动力传输和控制,其工作原理核心在于利用液体的不可压缩性来传递大的能量。这篇文章将深入剖析液压机器人的工作原理、核心构成及性能优点。
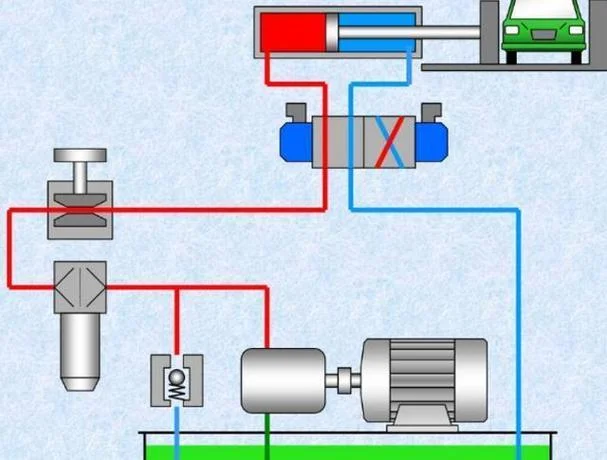
核心原理:液体动力循环
液压机器人的动力传输遵循帕斯卡定律(Pascal's Law)。该原理指出:在密闭容器中,施加于静止液体上的压强,能够大小不变地传递到液体的各个部分。
当液压泵( hydraulic pump)将液压油从油箱吸入,并在泵内被机械结构“挤压”时,液压油的压力会瞬间升高。这个高压油通过油道传输至执行机构(如缸筒或马达),推动活塞或叶片运动。由于液压油的粘度极高且不可压缩,它能将电机轴上的扭矩高效、无损耗地传递给负载,从而实现平稳、有力的动作。
数据说明:流量与压力的关系
液压系统的输出扭矩()与油液流量()和系统压力()直接相关。在负载不变的情况下,提高压力可显著增加输出扭矩,但会伴随发热和阻力增大。
> | 参数 | 低负载工况 | 重载工况 | 过载保护机制 |
| :--- | :--- | :--- | :--- |
| 系统压力 (MPa) | 3 - 5 MPa | 8 - 15 MPa | 自动泄压至 2 MPa |
| 输出扭矩 (Nm) | 200 - 400 Nm | 600 - 1500 Nm | 触发急停,切断动力 |
| 动作响应时间 | 0.1 - 0.2 秒 | 0.5 - 1.0 秒 | 延迟 0.8 秒后动作 |
首要组成部分
液压机器人的整体架构包含以下三个关键部分:
1. 液压动力源 (Hydraulic Power Unit)
液压泵:将机械能转换为液压能,是动力的源泉。选用柱塞泵或叶片泵,结构坚固,寿命长。
控制阀组:负责调节流量和压力,控制执行机构的动作逻辑(如快进、工进、慢进、回缩)。
油箱与管路:储存液压油,并防止气蚀和杂质进入系统。
2. 液压执行机构 (Hydraulic Actuator)
液压缸:将液压能转换为机械能,实现直线往复运动。根据行程方向分为直线缸和摆动缸。
液压马达:将液压能转换为旋转运动,用于驱动旋臂或关节。
3. 运动控制系统 (Motion Control System)
由电液比例阀、传感器(如位置传感器、力传感器)和控制器(PLC 或伺服系统)组成。它负责根据指令实时调整系统压力,实现精确的定位控制。
工作原理的三种典型应用模式
液压机器人的动作模式分为前馈模式(Feed Mode)、跟随模式(Follow Mode)和反作用模式(Reaction Mode),这些模式直接决定了机器人的工作性能:
| 动作模式 | 工作原理 | 特点与适用场景 |
|---|---|---|
| 前馈模式 | 经由传感器感知负载转变,提前调整油阀开度,以维持恒定压力。 | 响应最快。适合须要频繁启停的场合,如搬运货物。 |
| 跟随模式 | 保持负载恒定,当负载增加时自动降低速度;负载减小时则提高速度。 | 平稳舒适,但响应稍慢。适合精细装配任务。 |
| 反作用模式 | 当负载超过设定值时,系统自动切断动力,防止过载损坏。 | 安全性高。适合人形机器人或大型物流机械。 |
液压机器人特长
相较于纯电子控制的机器人,液压机器人展现出独特的技术长处,使其在特定领域不可替代:
高负载能力:液压系统天生具备高扭矩特性,轻松应对数百公斤甚至数吨级的负载。
高刚性:由大直径液压缸驱动,机器人身体结构刚强,抗干扰能力强,不易发生形变。
恶劣环境适应性:液压系统不受电磁干扰,能在强电磁环境(如焊接车间)或粉尘、震动环境中稳定运行。
动作柔和:利用液压油的阻尼特性,动作过渡平滑,避免了电子驱动常见的“抖动”现象,适合精密作业。
液压机器人是工业制造与物流领域的“强壮臂膀”。虽然其响应速度不及纯伺服机器人,但其力量、稳健性与可靠性赢得了广泛的认可。随着油路控制系统和液压马达技术的不断迭代,液压机器人正逐渐向集成化、小型化和智能化发展,在未来工业场景中将继续发挥“硬实力”的独特价值。
 47 人看过
47 人看过
 44 人看过
44 人看过
 43 人看过
43 人看过
 32 人看过
32 人看过