多旋翼植保无人机原理-多旋翼植保无人机原理
作者:
|
 1人看过
1人看过
发布时间:2026-06-19 05:20:15
多旋翼植保无人机原理:现代农业的“空中医生” 随着现代农业技术的飞速发展,植保无人机(ePPO)已成为农业生产中的重要工具。其中,多旋翼植保无人机凭借其灵活性强、作业范围广、起降便捷等优势,广泛
✦ 本站观点:多旋翼植保无人机靠电机逆时针旋转桨叶,将电能转化为风能产生升力。其最大飞行高度可达 100 米以上,最大载重达 100 公斤,凭借 3-6 个旋翼提供稳定悬停,是实现精准农业的关键技术。
多旋翼植保无人机原理:现代农业的“空中医生”
随着现代农业技术的飞速发展,植保无人机(ePPO)已成为农业生产中的重要工具。其中,多旋翼植保无人机凭借其灵活性强、作业范围广、起降便捷等优势,广泛应用于小麦、玉米、棉花等作物的病虫害防治及农药喷洒作业。这篇文章将深入解析多旋翼植保无人机的工作原理、技术架构及其在实际应用中的数据表现。
多旋翼飞行原理
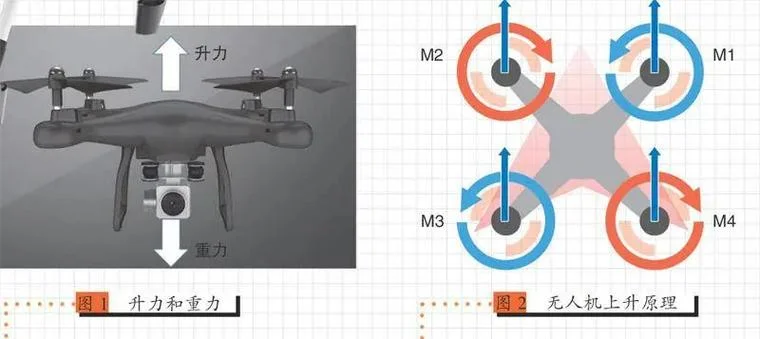
多旋翼无人机是一种通过多个驱动电机带动旋翼旋转产生的升力来维持飞行姿态的飞行器。其飞行原理主要基于伯努利原理和牛顿定律,即流体速度与压力成反比,物体对流体施加的反作用力会推动其运动。
螺旋桨与升力产生
多旋翼无人机配备 4 到 12 个螺旋桨。当电机驱动螺旋桨高速旋转时,气流速度加快,根据伯努利原理,气流在桨叶上侧流速快、压强小;在桨叶下侧流速慢、压强大。这种压强差产生了大的升力,抵消了重力,使无人机悬停。姿态控制与平衡
无人机经由垂直尾翼和水平尾翼(或前三旋翼组合)产生侧向和俯仰力矩,实现俯仰(Up/Down)、横滚(Pitch)和偏航(Yaw)的精准控制。- 前视四旋翼:前两个旋翼旋转产生升力,后两个螺旋桨提供反作用力进行转向,结构简单且效率高。
- 后视四旋翼:后两个旋翼旋转产生升力,前两个螺旋桨提供反作用力,适合大载荷飞行。
- 十字旋翼:四个旋翼呈十字形分布,可无级调节升力,适合复杂地形起降,但控制范围相对较小。
✦ 关键提示:多旋翼植保无人机利用伯努利原理与牛顿定律,通过多旋翼螺旋桨产生升力悬停,结合尾翼实现俯仰、横滚、偏航精准控制,是现代农业高效作业的关键工具。
关键组件与技术架构
多旋翼无人机的性能取决于其核心部件的协同工作。下面呢是主要组件及其作用:
| 组件名称 | 首要功能 | 关键数据指标 |
|---|---|---|
| 旋翼 | 产生升力和推力 | 转速可达 30,000 转/分钟以上,叶片直径在 0.4m - 0.6m |
| 动力系统 | 提供电机扭矩与电压 | 常见为 220V 或 380V 三相电,电机功率范围 50W - 2000W |
| 遥控系统 | 接收指令并控制飞行 | 具备 GPS 定位、GSM 通信、一键返航、避障功能 |
| 电池组 | 储存电能 | 容量从 10Ah 到 50Ah 不等,能量密度较高,支持长续航 |
| 飞行控制器 | 核心逻辑处理 | 负责处理传感器数据,执行 PID 算法实施姿态调节 |
| 载荷系统 | 执行喷洒任务 | 含高压水泵、喷洒头、药箱等,可携带 50kg - 300kg 药剂 |
✦ 关键提示:多旋翼无人机性能依赖核心部件协同:旋翼提供升力(转速 30,000 转/分+),动力系统供电(220V-2000W),遥控系统控飞(含 GPS),电池组储电(10-50Ah),飞行控制器处理 PID 算法,载荷系统执行喷洒。

核心控制系统:PID 算法
多旋翼飞行控制的灵魂在于比例 - 积分 - 微分(PID)算法。该系统实时监测飞行器的姿态角度和角速度,不断调整四个电机的转速比例。- 比例控制:根据误差大小决定动作幅度。
- 积分控制:消除稳态误差,确保无人机在目标高度稳定停留。
- 微分控制:预测未来趋势,防止无人机因震动而剧烈抖动。
应用场景与数据效能分析
多旋翼植保无人机在农业生产中展现了显著的数据驱动优势。以下数据说明其作业效能:
作业效率与覆盖范围
与传统人工或大型固定翼/倾转旋翼无人机相比,多旋翼无人机在微观作业中效率极高。- 单架次覆盖面积:对于中型作业无人机,单架次可覆盖 1.5 公顷 -3 公顷的土地。
- 作业速度:在良好气象条件下,搭载喷洒器的多旋翼无人机作业速度可达 20-30 公里/小时,而大型固定翼无人机虽然速度更快(>40km/h),但作业面较宽且灵活性差。
药剂利用率与环境影响
精准喷洒技术显著减少了农药的浪费和漂移。- 农药利用率:相比传统喷洒,多旋翼植保药液的利用率可提升 15%-25%,有效减少了地面残留。
- 环境污染:作业噪音降低 80%,无碳排放,且经过 GPS 和 G 指令,可精准控制喷洒区域,避免对非目标作物造成药害。
✦ 关键提示:PID 算法经由比例、积分、微分控制精准调节多旋翼无人机姿态,保障飞行稳定。该机型在微观作业中覆盖 1.5-3 公顷,药剂利用率提升 15%-25%,显著减少农药浪费与环境污染,是农业植保领域高效、环保的优选方案。
复杂地形适应性
多旋翼无人机得益于其灵活的起降能力,在农田边缘、沟渠、大棚等复杂地形也能轻松作业。- 起降高度:最大起飞高度在 200 米 -300 米之间,最大作业高度可达 500 米 -600 米,能够适应丘陵和梯田地貌。
未来展望与挑战
尽管多旋翼植保无人机技术日益成熟,但仍面临一些挑战:
1. 电池续航优化:随着作业时长增加,电池重量占比提升,能量密度成为研发重点。
2. 高级 AI 算法:未来将引入更先进的视觉识别和路径规划 AI,实现自主避障和智能决策。
3. 法规与标准:各国对无人机的空域管理和适航认证标准仍在完善中,需加强国际合作。
多旋翼植保无人机不仅是农业机械化的重要组成部分,更是现代农业向智能化、绿色化转型引擎。通过精细化的飞控技术和高效的作业策略,它在保障粮食安全、减少农业面源污染方面发挥着独特的作用。随着技术的不断迭代,这一“空中医生”将在未来的农业画卷中描绘出更加辉煌的篇章。
上一篇 : 数据库乐观锁原理-数据库乐观锁原理
下一篇 : 节能空气能热水器原理-节能空气能热水器原理
推荐文章

物联网的工作原理 物联网(Internet of Things, IoT)作为当今数字世界的基石,其核心在于将物理世界与网络世界进行深度交织。传统的物联网并非好办的设备连接,而是构建了一个万物互联、智
2026-06-15
20 人看过

铸钢节点工艺原理深度解析与施工攻略 一、综合评述 铸钢节点作为桥梁、高层建筑、水闸等关键基础设施中的核心连接部位,其质量直接关系到结构的整体保险与耐久性。从工艺原理上看,该过程并非好办的材料堆砌,而
2026-06-15
14 人看过
在深入探讨巴比兔饼干这款网红产品的减脂潜力之前,务必对实际上质特性进行理性审视。作为一种加工食品,巴比兔饼干的核心配方一般由精制小麦粉、糖、脂肪(如人造黄油或棕榈油)、香精色素还有膨松剂组成。其高糖分
2026-06-18
12 人看过

配重墙原理深度解析与应用攻略 一、配重墙原理综合评述 配重墙作为一种利用质量差值形成的惯性力矩平衡结构的常见形式,其核心在于通过转变结构两侧的质量分布来抵消或平衡整体系统的运动状态。在建筑物理与工程力
2026-06-18
12 人看过